Использование MATLAB для оценки возможности комплексирования информационных сигналов на основе нечеткой логики и фильтрации Калмана
Автор - В. М. Понятский
При выполнении комплексирования сигналов от информационных систем одна из основных проблем заключается в определении границ, в которых следует использовать тот или иной набор сигналов и самих режимов работы. Рассматривается подход, основанный на оценке значений координат центра тяжести результирующей функции принадлежности нечеткой системы вывода. В соответствии с полученной оценкой координаты центра тяжести определяются режимы работы и веса информационных сигналов.
1. Постановка задачи
При использовании нескольких информационных систем (ИС) изменение условий работы или появление помех может приводить к тому, что меняется характер информационных сигналов и возникают ситуации, когда необходим выбор режима работы: использование одной из систем или их комплексирование.
В статье рассматривается метод комплексирования ИС на основе нечеткой логики и фильтрации Калмана. Использование нечеткой логики обеспечивает решение задачи определения границ режимов функционирования ИС и весов сигналов в соответствии с оценками значений координат центра тяжести результирующей функции принадлежности.
2. Алгоритм комплексирования информационных сигналов, основанный на фильтрации Калмана
Дискретный алгоритм оценивания состояния объекта управления в рамках методов фильтрации Калмана имеет вид [1 - 2]:
![]()
![]()
![]()
![]()
![]()

![]()
где ![]() – вектор наблюдений;
– вектор наблюдений; ![]() – вектор оценок наблюдений;
– вектор оценок наблюдений; ![]() – оценка вектора состояния наблюдаемого объекта или процесса;
– оценка вектора состояния наблюдаемого объекта или процесса; ![]() – оценка скорректированного вектора состояния наблюдаемого объекта или процесса;
– оценка скорректированного вектора состояния наблюдаемого объекта или процесса; ![]() – оценка вектора прогнозирования состояния наблюдаемого объекта или процесса;
– оценка вектора прогнозирования состояния наблюдаемого объекта или процесса; ![]() – матрица упреждения;
– матрица упреждения; ![]() – матрица наблюдения;
– матрица наблюдения; ![]() – матрица коэффициентов;
– матрица коэффициентов; ![]() – дисперсионная матрица предсказания вектора состояния наблюдаемого объекта или процесса;
– дисперсионная матрица предсказания вектора состояния наблюдаемого объекта или процесса; ![]() – дисперсионная матрица оценки вектора состояния наблюдаемого объекта или процесса;
– дисперсионная матрица оценки вектора состояния наблюдаемого объекта или процесса; ![]() – матрица интенсивности шумов;
– матрица интенсивности шумов; ![]() – матрица интенсивности полезного сигнала;
– матрица интенсивности полезного сигнала; ![]() – вектор управления;
– вектор управления; ![]() – матрица коэффициентов управления;
– матрица коэффициентов управления; ![]() – вектор весовых коэффициентов;
– вектор весовых коэффициентов; ![]() – процедура коррекции оценок фильтра Калмана,
– процедура коррекции оценок фильтра Калмана, ![]() – матрица, учитывающая тип и качество измерителя или отсутствия измерений
– матрица, учитывающая тип и качество измерителя или отсутствия измерений ![]() ;
; ![]() – количество измерителей.
– количество измерителей.
Непрерывный алгоритм фильтрации Калмана имеет вид [1-2]:
![]()
![]()
![]()
где ![]() – вектор измерений i-го датчика;
– вектор измерений i-го датчика; ![]() – вектор оценок наблюдений;
– вектор оценок наблюдений; ![]() – оценка скорректированного вектора состояния наблюдаемого процесса;
– оценка скорректированного вектора состояния наблюдаемого процесса; ![]() – оценка вектора состояния наблюдаемого процесса;
– оценка вектора состояния наблюдаемого процесса; ![]() – матрица упреждения;
– матрица упреждения; ![]() – корреляционная матрица ошибок фильтрации;
– корреляционная матрица ошибок фильтрации; ![]() – матрица наблюдения;
– матрица наблюдения; ![]() – вектор коэффициентов усиления;
– вектор коэффициентов усиления; ![]() – матрица интенсивности шумов;
– матрица интенсивности шумов; ![]() – матрица интенсивности полезного сигнала;
– матрица интенсивности полезного сигнала; ![]() – вектор управления;
– вектор управления; ![]() – матрица коэффициентов управления;
– матрица коэффициентов управления; ![]() – матрица весовых коэффициентов;
– матрица весовых коэффициентов; ![]() – процедура коррекции оценки фильтра Калмана,
– процедура коррекции оценки фильтра Калмана, ![]() – матрица, учитывающая тип и качества измерений или отсутствия измерений
– матрица, учитывающая тип и качества измерений или отсутствия измерений ![]() ,
, ![]() - количество измерителей.
- количество измерителей.
Рассматривается возможность регулирования полосы пропускания фильтра Калмана в соответствии с качеством функционирования каналов измерений.
3. Алгоритм оценки весов информационных сигналов, основанный на нечеткой логике
В работе [3] рассмотрен метод комплексирования информационных систем, основанный на нечеткой логике. Использование нечеткой логики определено двумя факторами:
1) отсутствием точного определения/формализации границ, в которых целесообразно использовать тот или иной набор сигналов;
2) необходимостью определения весов информационных сигналов при комплексировании.
Метод обеспечивает задание количественных границ для режимов работы и весов сигналов и основан на оценке значения координаты центра тяжести (ЦТ) результирующей функции принадлежности нечеткой системы вывода (НСВ) от входного параметра: предлагается границы режимов определять как области пересечения входных и выходных функций принадлежности НСВ, а весовые коэффициенты сигналов – как координаты ЦТ.
Для случая, когда имеется две информационные системы и один критерий качества функционирования, за который принято СКО сигнала, разработан алгоритм оценки весов информационных сигналов, основанный на нечеткой логике [3]. Для реализации полученного алгоритма в системе реального времени с ограниченными вычислительными ресурсами можно использование заранее рассчитанной траектории ЦТ в виде ломаной, полученной в соответствии с рассматриваемым методом:

где:
 – нормированная переменная;
– нормированная переменная; ![]() и
и ![]() – СКО сигнала ТВ- и ТПВ-каналов; РТВ и РТПВ – границы режимов работы.
– СКО сигнала ТВ- и ТПВ-каналов; РТВ и РТПВ – границы режимов работы.
Тогда значения весовых коэффициентов будут определяться уравнениями:
При этом следует отметить, что по полезному сигналу коэффициент передачи будет равен единице, а полоса пропускания будет постоянной, а по шумам для ТВ- и ТПВ-каналов коэффициенты передачи будут весовыми соответственно: ВТВ/(ВТВ+ВТПВ) и ВТПВ/(ВТВ+ВТПВ) и полосы пропускания будут меняться в соответствии уровнем СКО ВТВ и ВТПВ.
4. Результаты
Анализ описанного подхода проводится в среде MATLAB на примере оценки воздействия на систему, содержащую два измерителя. Оценка вектора состояния ![]() производится с помощью фильтрующих звеньев второго порядка. Для двухканального фильтра соответствующие матрицы выглядят следующим образом (рис. 1):
производится с помощью фильтрующих звеньев второго порядка. Для двухканального фильтра соответствующие матрицы выглядят следующим образом (рис. 1):
 ,
, ![]() ,
, ![]() ,
,  ,
,  .
.
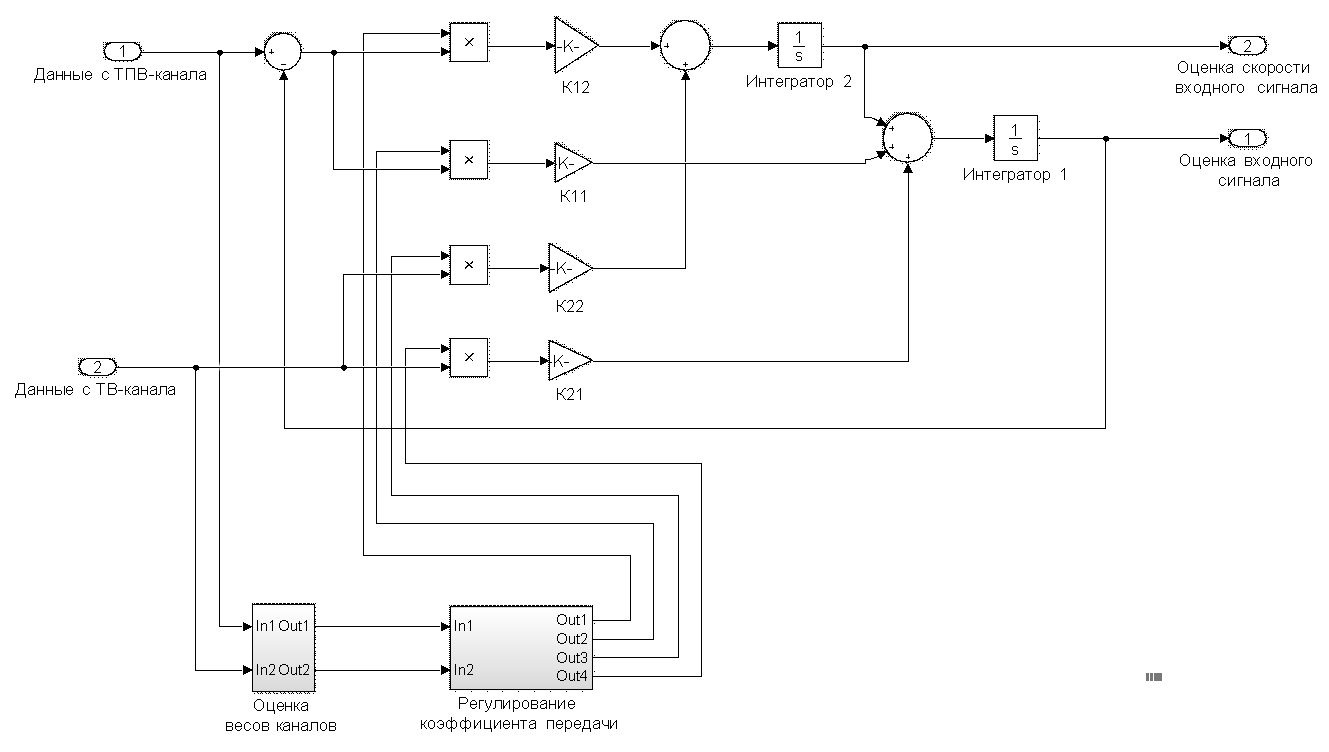
Рис. 1. Схема двухканального фильтра c с регулированием полосы пропускания
Для оценки алгоритма комплексирования на реальных сигналах были использованы телеметрические данные, полученные в ходе испытаний, представляющие собой информацию от ТВ- и ТПВ-каналов комплекса. Телеметрические данные (см. рис. 2 - 3) имеют статистики, приведенные в таблице.
Таблица – Статистики исходных сигналов
|
Сигнал |
Мат. ожидание |
Дисперсия |
СКО |
|
ТВ-канал |
-0,0116 |
0,0003007 |
0,0173394 |
|
ТПВ-канал |
0,0002 |
0,0001840 |
0,0135637 |
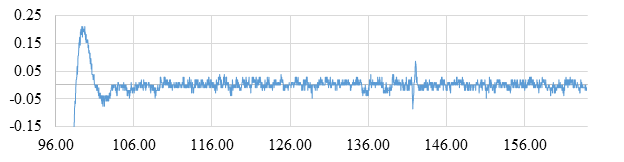
Рис. 2. Телеметрические данные от ТПВ-канала
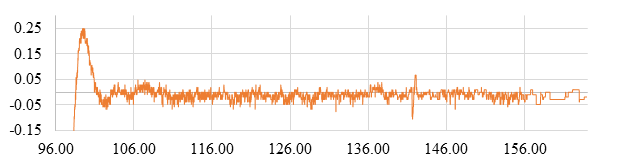
Рис. 3. Телеметрические данные от ТВ-канала
На рисунке 4 приведены оценки изменения полос пропускания в фильтре Калмана, полученные в соответствии с весами на выходе алгоритма комплексирования. Анализ расчета СКО для ТВ- и ТПВ-каналов показывает, что уровень помех выше в ТВ-канале (см. табл.) и следовательно, для лучшего подавления шумов полоса ТВ-канала более узкая, чем полоса ТПВ-канала (см. рис. 4).
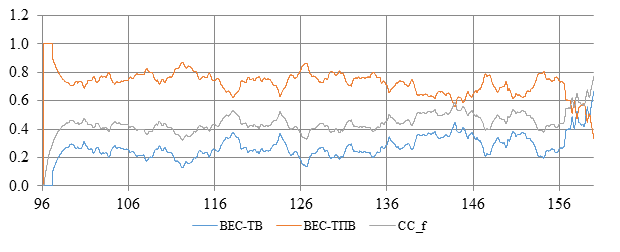
Риc. 4. Изменение полос пропускания фильтра Калмана по ТВ- и ТПВ-каналам: ![]()
На рисунке 5 приведены результаты комплексирования сигналов на выходе фильтра Калмана для случая с регулированием полос пропускания по ТВ- и ТПВ-каналам.
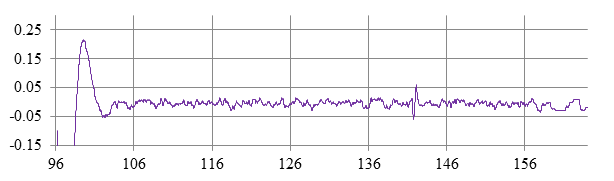
Рис. 5. Сигнал на выходе фильтра Калмана с регулированием полосы пропускания
Сравнение уровня шумов сигналов показывает, что комплексирование с помощью фильтра Калмана обеспечивает значительное уменьшение СКО шумов порядка 5-6 раз по сравнению с СКО самого точного канала (см. рис. 7).
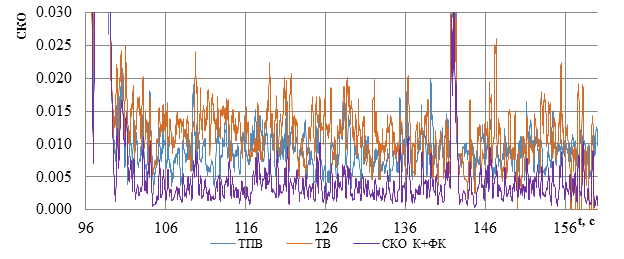
Рис. 6. СКО сигналов: ТВ-канал – ТВ; ТПВ-канал – ТПВ; сигнал на выходе фильтра Калмана с регулированием полос пропускания – СКО К+ФК
Таким образом, проведенное моделирование показало, что комплексирование двух каналов с разными уровнями среднеквадратического отклонения позволяет получить СКО суммарного сигнала гораздо меньшее, чем СКО самого точного канала.
Список литературы
1. Понятский В.М. Повышение качества обработки информации, поступающей с нескольких видеосенсоров, в задачах управления // Современные информационные технологии и ИТ-образование. 2016. Т. 12. № 4. С. 165–172.
2. Понятский В.М., Зенов Б.В. Применение фильтра Калмана для задач управления подвижными объектами // Современные информационные технологии и ИТ-образование. 2018. Т. 14. № 3. С. 625-630.
3. Понятский В.М., Горин А.В. Комплексирование сигналов от неравноточных информационных систем с помощью нечеткой логики // International Journal of Open Information Technologies. 2019. Т. 7, № 3. С. 25-31.
Комментарии